
In the dynamic and open real world, enabling intelligent robots to continuously acquire new skills like humans while retaining previously learned knowledge represents a core technological bottleneck in the fields of artificial general intelligence and robotics. Under traditional learning paradigms, when robots learn new tasks, new knowledge often interferes with or completely overwrites previously acquired skills. This "catastrophic forgetting" phenomenon severely limits the potential of robots for long-term autonomous service in complex scenarios.
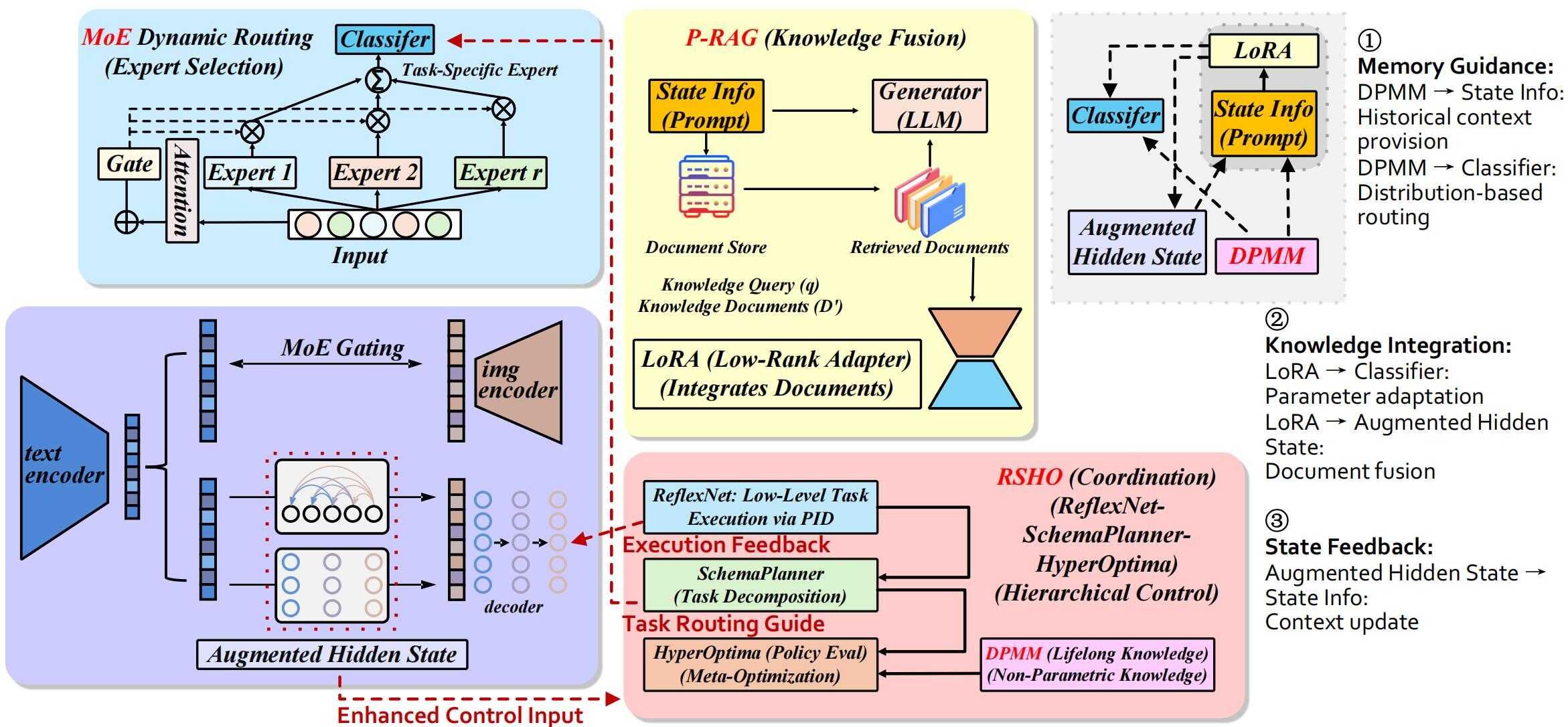
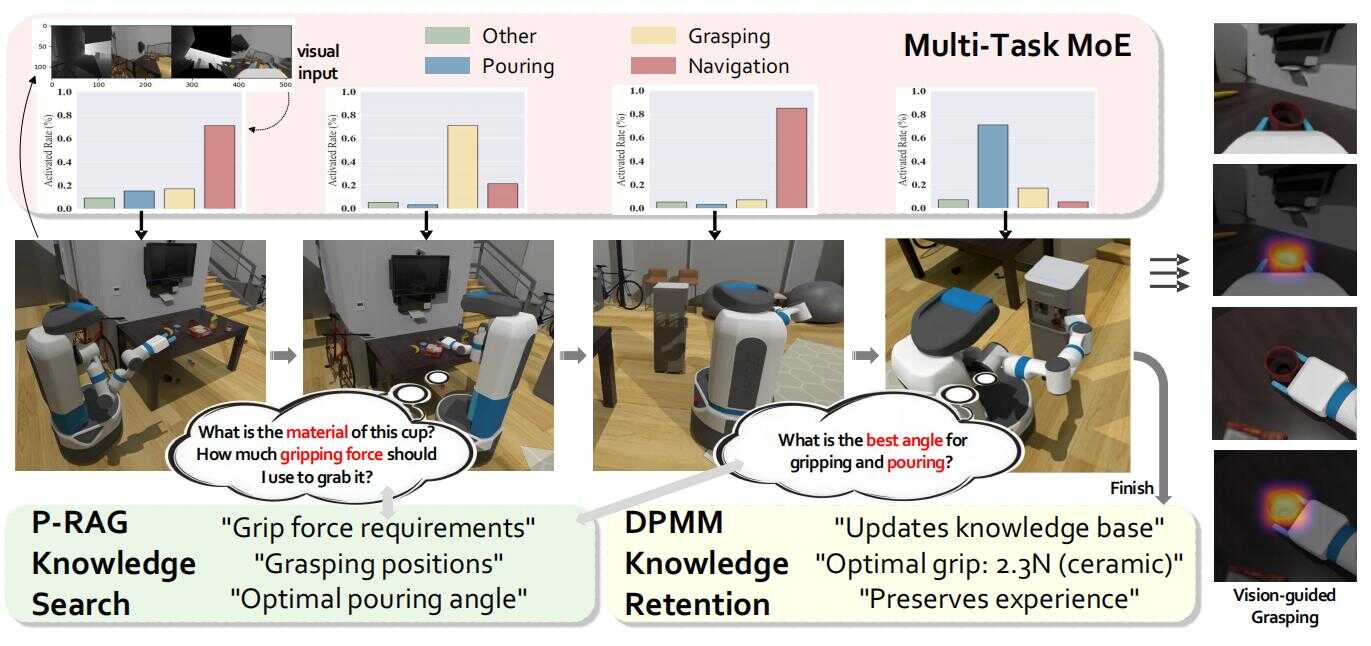
Recently, the Key Laboratory of Big Data and Intelligent Computing at the Chongqing Institute of Green and Intelligent Technology, Chinese Academy of Sciences, published a paper titled "DRAE: Dynamic Retrieval-Augmented Expert Networks for Lifelong Learning and Task Adaptation in Robotics" at the CCF Class A conference ACL 2025. The paper proposes a novel robot lifelong learning framework called DRAE (Dynamic Retrieval-Augmented Expert Networks). Addressing the core technical bottlenecks faced by existing methods—static network structures that struggle to adapt to dynamic task changes and fixed retrieval systems unable to handle continuously evolving knowledge demands—the research team drew inspiration from the neural plasticity mechanisms of the human brain to construct a quadruple collaborative technical architecture: the Mixture-of-Experts (MoE) model handles intelligent task routing and allocation, guiding the Parameterized Retrieval-Augmented Generation (P-RAG) technique to precisely acquire relevant information from external knowledge bases. This augmented information, together with task states, is fed into the ReflexNet-SchemaPlanner-HyperOptima three-layer cognitive control architecture for complete perception-planning-execution decision processing, while the Dirichlet Process Mixture Model (DPMM) dynamically stores key knowledge from the entire processing pipeline through non-parametric Bayesian methods, forming a closed-loop feedback mechanism for task-level knowledge accumulation. The key breakthrough of this method lies in deeply integrating the four core components through a unified mathematical framework, achieving effective decoupling of knowledge retrieval and parameter updates, fundamentally solving the destructive overwriting of old skill parameters during new skill learning, and providing a viable technical pathway for continuous autonomous learning of robotic systems in complex environments.
Experimental results demonstrate that the DRAE framework achieves international advanced levels across multiple key metrics. In the MimicGen multi-task robot manipulation benchmark, the average task success rate reached 78%, significantly surpassing the traditional MoE baseline model's 73%. In the NAVSIM autonomous driving navigation simulation benchmark, the comprehensive evaluation score reached 82.5 points, achieving the best performance in two key metrics: path completion rate (98.4%) and collision avoidance rate (96.2%). On the LLFF and NeRF Synthetic 3D visual synthesis datasets, peak signal-to-noise ratios reached 26.07dB and 27.47dB respectively, exceeding current state-of-the-art methods. In physical humanoid robot testing with 12 complex motion instruction tasks, success rates reached 90-100%, validating the framework's effectiveness in real-world environments.
This research achievement provides a new technical pathway for enhancing robots' continuous learning and adaptive capabilities in complex, unstructured environments. While effectively mitigating catastrophic forgetting, it maintains computational efficiency, offering valuable reference for developing robot systems capable of long-term autonomous learning.
The authors of the paper include Yayu Long and Kewei Chen, first-year master's students at the Chongqing Institute of Green and Intelligent Technology, Chinese Academy of Sciences, with Prof. Mingsheng Shang as the corresponding author. The research was supported by projects such as the National Natural Science Foundation of China.